Dynamic Vision Lab
The DVL studies visual and 3-D perception for mobile robots, particularly methods for robust, real-time tracking, detection, and segmentation in semi-structured outdoor environments.
We are part of the Department of Computer and Information Sciences at the University of Delaware

Trail following
We developed a system which detects and tracks rough paths despite widely varying tread material, border vegetation, and illumination conditions through a combination of appearance and structural cues
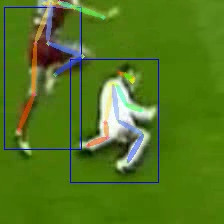
Semantic sports analysis
We explored deep learning approaches to soccer event detection, as well as individual and ensemble action recognition techniques, toward automatic refereeing and summary generation systems

DARPA robotics challenge
We designed a multi-sensor head for a HUBO humanoid robot and programmed it to drive a utility vehicle, carry a hose, and other tasks

Animal detection
We investigated visual object detectors based on deep neural networks that can quickly and accurately find natural objects such as bird nests and scallops in cluttered scenes from moving robotic platforms
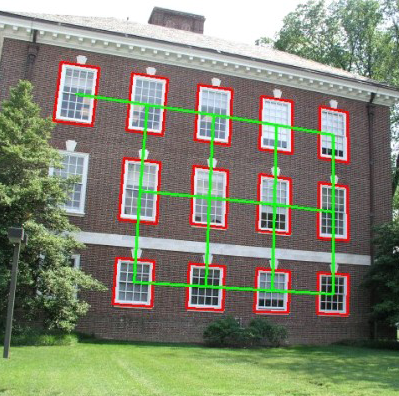
Other projects
Semantic labeling of point clouds, DARPA Grand Challenges, IGVC competitions, parsing building facades, projector-camera systems, ...